人工智能
Artificial Intelligence
人工智能
人工智能是计算机科学的重要分支,是研究、开发用于模拟、延伸和扩展人的智能的理论、方法、技术及应用系统的一门新的技术科学。人工智能技术能够有效解放人们的思想,超越人类智慧的边界,为人们的对事物的识别、分析、决策以及预测提供强有力的支撑。
慧伊创新拥有经验丰富的研发团队和强大的数据中心,能够快速响应客户需求,根据用户需求进行研发。
机器视觉
目标检测;目标识别;目标重识别;目标跟踪;图像修复
机器视觉是人工智能技术的重要组成部分,通过计算机来处理图像、视频,能够将图像、视频中的特征进行提取,进而实现对内容的识别、目标检测、重识别、跟踪,亦可根据图像信息和内容做出相应动作。
目标检测与识别


数据分析与数据挖掘
分类与聚类;预测
数据挖掘是在大量数据中通过统计学、人工智能、机器学习等方法,寻找位置的模式和规律,进而挖掘出有价值的信息和知识。随着深度学习技术的发展,相关技术也不断应用于数据分析与数据挖掘,能够更加高效的从既有数据中获取更有价值的信息,并通过相关数据对未来进行预测。
时空数据预测
随着数据采集、传输与存储技术的发展,包括交通运输行业在内的众多领域都积累了海量的时空数据,通过对历史数据的分析挖掘,可以为时空数据的变化进行预测,为相关行业的决策、未来规划都提供有效支持。
公共交通线网规划与优化
通过对城市公交、城乡客运、长途客运客流走向分析与预测,实现线路与客流最佳匹配。
城市公交智能调度
通过历史交通、客流、车辆数据,统筹考虑乘客出行体验、运营成本以及车辆技术状态,动态优化发车班次、间隔以及车辆使用。
高速铁路延误预测
对不同场景下列车延误请客进行分析和预测,快速预测延误影响范围和大致持续时间。
机车及动车组交路优化
在充分利用车辆修程的前提下,提高综合利用效率,降低运用成本。
智能感知与控制
智能感知;智能控制
智能感知通过传感器实时获取信息并将物理信号映射为数字信息,通过智能控制系统对采集到的数据快速存储和处理,并通过学习和推理给出相应的决策。全自主飞行的无人机,智能机器人以及自动驾驶等技术均在智能感知的基础上,对信息进一步进行分析,结合先验知识做出相应动作。
多传感器融合SLAM
将包括激光雷达、双目视觉、姿态传感器、超声波传感器、气压计等多种传感器数据进行融合,能够实应不同场景下的定位和地图构建,进而实现自主导航与避障碍。
基于双目视觉和IMU的建图、定位与避障
概述
系统主要包括双目视觉传感器,惯性导航(IMU)模块和计算模块三个部分,融合双目视觉与惯性导航数据来实现视觉定位,同时通过视觉定位和深度图像实现地图实时生成、路径规划和避障,亦可实现多机编队。
配套产品

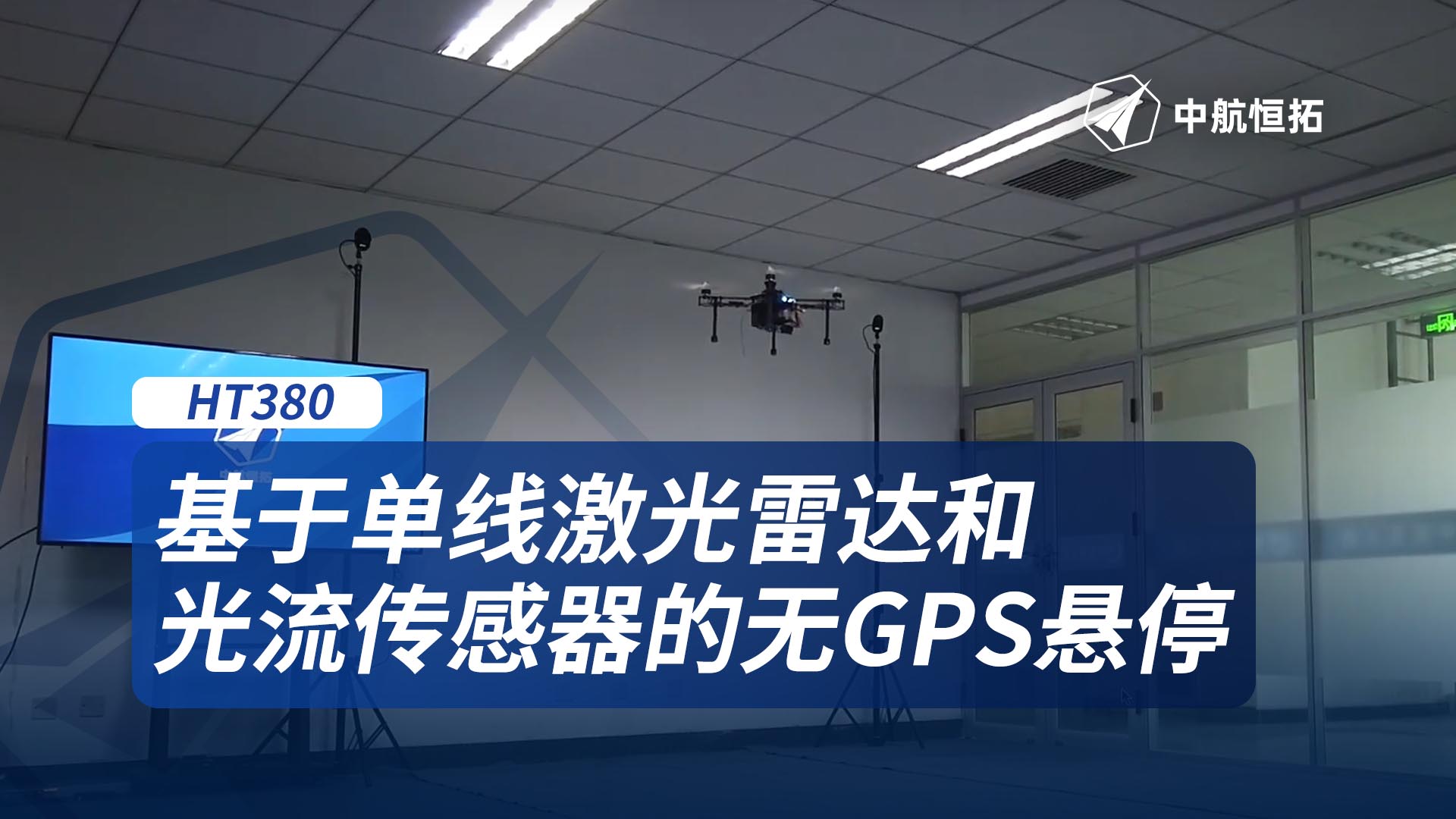
基于单线激光雷达和光流的定位
概述
通过单线激光雷达和光流传感器提供共同提供水平方向位置信息,通过超声波传感器提供高度信息,实现高精度定位,多用于无人机室内飞行。
基于激光雷达和IMU的建图、定位与避障
概述
主要适用于范围较大的区域的建图和定位,能够减少外界光线对机器视觉的干扰,多用于地面机器人。
基于外部传感器的实内定位
使用视觉动态捕捉或UWB技术实现实内高精度定位。
基于动态捕捉的高精度室内定位
概述
光学动捕系统是一种用于准确测量物体(刚体)在室内三维空间运动信息的设备。具有高精度的室内定位能力,能够给室内小车、无人机、机器人、机械手臂等智能体提供高精度的空间位置信息。依靠一整套精密而复杂的光学摄像头来实现,它通过计算机视觉原理,由多个高速摄像机从不同角度对目标特征点进行跟踪来完成全身的动作的捕捉。
工作原理
精准记录运动信息,基于计算机视觉原理,光学室内定位系统通过布置在空间中的多个红外摄像机捕捉区域内物体上反光标识点的运动信息,并以图像的形式记录下来。实时解算六自由度位姿,利用计算机对捕捉到的图像数据进行处理,实时地解算出运动物体的六自由度位姿,即三自由度位置(X,Y, Z坐标)和三自由度姿态(俯仰角,偏航角和滚转角)。该系统也可以称为“室内定位系统”或“室内GPS”。多架相机支持,覆盖范围广,光学室内定位系统采用智能相机,将反光球图像坐标传到主机,不同相机数目将产生不同的覆盖范围,相机越多,覆盖范围越大。

基于UWB的高精度室内定位
概述
UWB技术是一种无载波通信技术,利用纳秒至微秒级的非正弦波窄脉冲传输数据,辐射非常低,通常只有手机辐射的千分之一,因此在工业上应用时,其不存在对其他仪器仪表的干扰问题采用对脉冲信号到达时间的精确测量这一方式,使得接收器对发射源的时间感知更为准确,距离精度可达5cm,后期进行精确定位的精度可达10-30cm。
工作原理
在室内空间安装若干个定位基站,定位基站的位置坐标为已知,在基站安装时候要确定每个定位基站的坐标。 无人机上携带定位标签,通过无线传输将位置坐标给到无人机,无人机的高度信息一般通过气压计给出。它能精准的提供被定位目标在一张平面图上所处位置的坐标,一般适用于大面积、开阔的室内外区域定位。
更多内容




无人机相关配套软件
无人机控制与调试系统



面向中小企业和个人的 高性能计算服务
人工智能技术已逐步应用于各个领域, 但无论是模型训练、测试、仿真都需要强大的算力支持才能够实现,而多媒体技术,3D建模等领域同样需要强大的算力支持,为了实现所需算力,硬件成本较高,部分中小企业和研究机构相关业务较少,通常无法承担高昂的设备采购成本。个人用户尤其是高校学生往往对时效性要求较高,部分实验室设备配置不足,需排队使用,对研究进度可能会造成不利影响。更关键的是,软硬件配置和相关环境搭建也需要一定的专业技术,部分研究者需要消耗大量时间进行前期准备工作,也无法快速解决遇到的各种问题,不可靠的环境可能还会对计算结果造成干扰。另外,若使用线上算力平台,数据集和素材较大时无法快速实现部署,且保密数据通过互联网传递也容易产生安全风险。 综上,我们提供安全、可靠的线下高性能计算服务,可直接将实验数据集、媒体素材通过个人计算机或移动存储设备携带,无需通过互联网传递,加之我们提供的一系列安全保障措施,能够保证用户数据绝对安全,同时我们提供一对一的环境配置、算法优化等相关技术支持,快速解决遇到的各种问题,大幅提高您的工作效率。